
Autonomous vehicles rely on many sensor technologies, or sensor modalities, each providing their characteristic view of the surrounding world. Each sensor measuring the outside of the vehicle responds differently to weather conditions. This has to be taken into consideration both in the early planning stage when designing the sensor suite for the autonomous vehicle platform and also while making steering decisions while driving.
Yet there is one sensor that works completely independently, connected only to the vehicle chassis and Autonomous Driving computer steering the vehicle: Inertial Measurement Unit or IMU.
Imagine stepping into a car, with your eyes and ears blinded. You can sense the acceleration of the vehicle and the turns it makes. You also know with quite a good certainty when the vehicle has stopped. In a familiar environment, you could constantly guess your current whereabouts. But the longer the ride takes, the harder it is to know exactly where you are.
IMU is about acceleration measurement
The sensor doing this measurement in the world of robotics is the Inertial Measurement Unit or IMU. It consists of two sensors: Accelerometer and gyroscope. The accelerometer measures the linear acceleration whereas the gyroscope measures the rotational acceleration.
With a known starting location and precise acceleration measurements, the IMU provides information on current vehicle location and orientation.
– Sensible 4 OnPoint positioning software is mainly based on LiDAR sensors. The rotation of a laser scanner installed on a moving vehicle creates distortion to the measured point cloud that needs to be corrected. This is a good example of the benefits of an IMU sensor as the correction is easier to do with proper acceleration data, Antti Hietanen, one of Sensible 4’s Autonomous Driving Engineers explains.

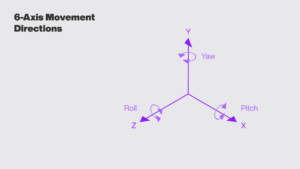
IMU is the only sensor technology that is independent of any information from the visual or radio spectrum. The performance of IMU is limited only by the accuracy of acceleration measurements of the sensor itself. Unlike sensors such as cameras and LiDAR’s, an IMU can be installed to a shielded container, deep into the vehicle’s chassis. So it’s completely immune to weather and other environmental conditions. IMU is also the only sensor that provides real-time data from all six axis movements at the same time.
Affordable, yet sophisticated
Compared to other sensors of the autonomous driving stack, the IMU is relatively affordable. Also, usually only one sensor unit is needed for one vehicle. For example, each of Sensible 4’s self-driving Toyota Proace vehicles use six LiDAR-sensors to have 360° visibility — with no blind spots around the vehicle. This means that sophisticated IMU’s will most likely be present in all sorts of vehicles soon.
One step towards this is the collaboration between Sensible 4 and Panasonic Industry. Panasonic provides automotive and industrial products and the IMU sensor is an important part of this portfolio. To improve the performance of the sensor and the software using it, Sensible 4 is collaborating with Panasonic in a joint test project.
In Sensible 4 autonomous vehicles, the IMU is never being used alone, as the sole source of location. But with our sensor fusion algorithms, it plays a critical role in positioning of the vehicle, in all weather conditions.